<-- zurück
 Das
ist ernst gemeint, 230V sind tödlich! Immer -auch beim "nur gucken"(!)- Stecker ziehen
und paar Sekunden warten, damit sich die Kondensatoren entladen können!
Das
ist ernst gemeint, 230V sind tödlich! Immer -auch beim "nur gucken"(!)- Stecker ziehen
und paar Sekunden warten, damit sich die Kondensatoren entladen können!Die MF70 besitzt eine Drehzahlregelung, die über einen Drehknopf manuell bedient werden kann. Im Netz habe ich diese Umbauanleitung gefunden, allerdings in italienisch.

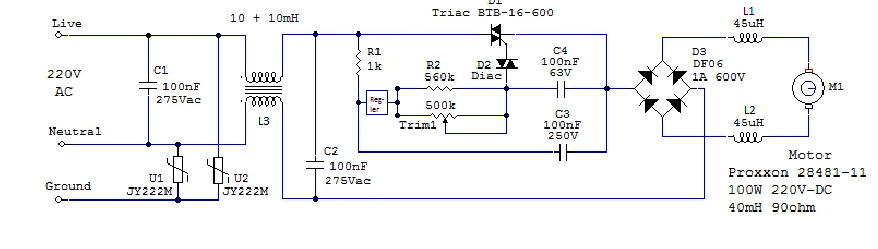
Der Schaltplan des eingebauten Originalreglers.
Funktionsweise:
- Der linke Teil bis einschließlich C2 dient der Funkentstörung und der Absicherung gegen Netzstörungen und Überspannungen.
- Der Motor ist ein 230V Gleichstrommotor (rechter Teil). D3 richtet die Wechselspannung gleich. L2 und L3 dienen der Funkentstörung. Weiterhin unterdrücken sie die Funkenbildung an den Motorelektroden, so dass deren Lebenszeit verlängert wird.
- Der mittlere Teil ist eine Phasenanschnittsteuerung. Im Prinzip wird C4 über die Widerstände R1, R2, Trim1 aufgeladen, bis die Schwellspannung des Diac D2 überschritten wird. Dieser zündet dann den Triac, der den Stromfluss zum Motor frei gibt. Beim nächsten Nulldurchgang der Netzspannung wird der Triac wieder gelöscht. Die Zeit, die benötigt wird C4 zu laden, kann über den Regler beeinflusst werden.

von oben (in der Abb. sind bereits die Stellen markiert, die später modifiziert werden)

von unten
Anpassung 1:
Die Drehzahl lässt sich im Originalzustand zwischen etwa 5.000 und 20.000 Umdrehungen pro Minute regeln (Herstellerangaben, siehe aber Drehzahlmessung). An der maximalen Drehzahl lässt sich wenig ändern. Die ist im Wesentlichen durch den Motor bestimmt. Die minimale Drehzahl erhält man, wenn Trim1 auf höchsten Widerstand eingestellt ist. In diesem Fall wird die Ladezeit hauptsächlich durch die parallel geschalteten Widerstände R2 und Trim1. Diese beiden Bauteile sind in der vorherigen Abbildung durch gelbe Kreuze markiert. Eine geringere Drehzahl erhält man, wenn R2 erhöht (1-2 MOhm) oder ganz entfernt wird.
Anpassung 2:
Hier ist der Trick, die den Ladestrom für C4 zu pulsen. Das Verhältnis von Pulsdauer zu Pulsfrequenz bestimmt dann die Energie, die zur Kondensatorladung zur Verfügung gestellt wird (PWM, Pulsweitenmodulation). Die gängigen Mikroprozessoren können passende PWM-Signale zur Verfügung stellen. Die Schaltung:

Drehzahlregelung durch PWM
Über J1 wird das PWM-Signal eingespeist (Amplitude etwa 5V). Der Optokoppler sorgt für eine galvanische Entkopplung. So wird eine saubere Trennung von der Netzspannung ermöglicht. R1 dient zur Strombegrenzung der LED im Optokoppler.
Q1 schaltet den Ladestrom frei. R2 bewirkt, dass der Transistor im Ruhezustand leitet. Dies hat den Vorteil, dass die Maschine ohne angeschlossenen Pulsgeber mit voller Drehzahl läuft. Trifft der PWM-Puls ein, wird der Fototransistor im Optokoppler leitend und schließt die Basis-Emitter-Strecke von Q1 kurz. Q1 sperrt daraufhin und unterbricht den Ladestrom. Der Gleichrichter sorgt dafür, dass die Wechselspannung immer in der richtigen Richtung am Transistor anliegt. Über die Punkt A und B kann also ein gepulster Ladestrom geführt werden.
Diese Schaltung ersetzt die Widerstandskombination R2/Trim1. Diese können entfernt werden (s. gelbe Kreuze in obiger Abbildung). Die Punkte A und B werden an den mit gelben Pfeilen markierten Stellen angeschlossen. A und B sind gleichwertig. Es ist gleichgültig wo A und wo B angeschlossen wird.
Für J1 nimmt man am besten einen Klinkenstecker, den man in den Deckel einlässt (s. folgende Abb.). Die Wahl der restlichen Bauteile ist relativ unkritisch. Wichtig ist, dass sie eine ausreichende Spannungsfestigkeit besitzen.

Klinkenstecker zur Einspeisung des PWM-Signals
Die Schaltung ist so einfach, dass sie problemlos auf einer Lochrasterplatine aufgebaut werden kann:
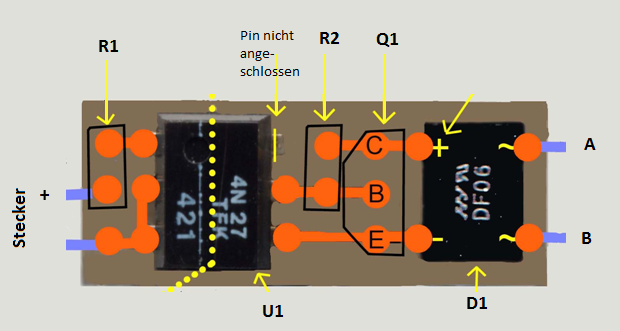
Fertig gelötet:

Anpassung 3:
Die vorhergehende Variante hat den Nachteil, dass die manuelle Regelung nicht mehr funktioniert und man praktisch immer ein PWM-Signal benötigt. Besser ist es, nicht das Potentiometer zu ersetzen, sondern eine Alternative zur Regelung über das Potentiometer einzubauen.
Schaltet man die obige Schaltung mit dem Potentiometer in Serie, sind beide Komponenten gleichzeitig wirksam. Man muss folgendes beachten: Ist kein PWM-Signal angeschlossen, ist Q1 leitend. Die Drehzahl wird ausschließlich durch das Potentiometer geregelt. Bei angelegten PWM-Signal wirken beide Systeme. Die Drehzahl kann durch das PWM-Signal maximal bis zur durch das Potentiometer vorgegebenen Höhe geregelt werden.
So muss der Anschluss vorgenommen werden:

A und B werden wieder an den gelben Pfeilen angeschlossen. Die Leiterbahnen müssen an den roten Balken aufgetrennt werden (Cutter-Messer, Dremel). Die blau markierte Verbindung muss mit einem Kabel hergestellt werden.
Ansteuerung:
Leider habe ich in der aktuellen Version (2.1.2012) der Steuerplatine keinen der PWM-Anschlüsse frei. Deshalb habe ich die Geschwindigkeit über einen normalen Pin geregelt. Ich benute PA0 und zum Timing den Timer2.
volatile uint8_t speed = 0; // enthält die aktuelle Geschwindigkeit |
Die Regelleistung dieses System wurde durchgemessen und war insgesamt enttäuschend (s. Drehzahlmessung). Es geht wohl nicht ohne eine Rgelung mit Rückkoplung der tatsächlichen Drehzahl. Mit den bestehenden Mitteln macht also nur eine ganz einfache Regelung überhaupt einen Sinn. Implementiert wird eine Regelung mit fünf Stufen:
| Angeforderte Drehzahl | eingestellte Drehzahl | Pulsweite |
| 0 | 0 | 0 |
| 1 ... 7.500 | 5.000 | 23 |
| 7.501 ... 12.500 | 10.000 | 26 |
| 12.501 ... 17.500 | 15.000 | 36 |
| 17.501 ... | 20.000 | 255 |
<-- zurück